Hello,
I am trying to build a dataset from a gesture controller (Leap Motion) in order to have a robust identification of a few gestures.
However I am not sure about a few basic choices/settings.
The first question is: should I use a MLP or a KNN? I have tried to follow the example of the fluid.mlpclassifier~ helpfile but my data (with a dimensionaity reduced to 2) do not exhibit clusters of points as easy to identify as those of the example. So does it mean that I should use a KNN instead? What are the criteria to choose a system or another?
Also, I don’t understand when/why one should reduce the number of dimensions of the points in the dataset. My points have 46 dimensions originally and I have reduced these to 2 dimensions to fit the fluid.mlpclassifier example but I don’t understand if there’s any obvious reason for this reduction and which number of dimensions to choose. Two dimensions seem to be good for a 2D controller but obviously the real data coming from the controller after training will have 46 dimensions. So what’s the right choice here?
This is a cool problem, as it is far from trivial. Let’s unpack together so I can help.
- I think your first problem is one of encoding the gestures. What do you analyse to generate those 46?
- you definitely do not want to reduce to 2d if you don’t need to. We can talk about that too.
- what ‘triggers’ the gesture recognition?
So again, knowing the data/application will help understand the task which will help help you (and everyone else reading this now and later)
bring it on!
OK. So the 46 data are hand and finger positions and quaternions as well as a few pre-cooked high-level detectors (grab, pinch, fingers extension flags).
The gesture recognition should match the flowrate of the sensor (not totally constant but can reach 120fps). I don’t want to reduce the flow because I am using it to control some continuous interpolation too.
Without NN I can detect some gestures yet but I want to get rid of false alarms (which occur for instance when we are in-between easily identifiable gestures).
ok this is fun. What i would do first is to augment the number of dimensions with context/trend windows. I presume some are doing that already but try doing a running average of the 46 (the ‘context’ of the last second or so)
then, with those 92 dimensions, I’d run a PCA on it to lower the dimension count - redundancy will be taken out and you know how much you lose. There is a full thread on this on the forum if you want to geek out, otherwise just aim for various acceptable representation (90% 95% etc)
then train the network on that. I reckon you’ll want a classifier. So you go from your input data using MLPClassifier. If you training data is a good representation, it should converge.
Try this (with and without the trend average), and see how it goes, and come back here. If that doesn’t work, we can brainstorm something else.
1 Like
Do you get the 92 dimensions by combining the original data with the averaged ones? Then, why putting them in the same dataset rather than comparing two different ones of 46 dimensions?
yes, 46 after 46. if it was 2
a b - a’ b’
for a 4 dimension set. that way you ahve the immediate dimensions (the first 46) and the trend dimensions (the last 46) for a 92 dimension single vector
you can do that with fluid.stat for the RT detrending
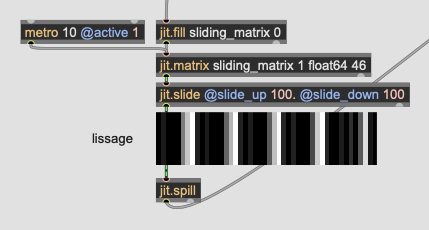
Nice! I took the Jitter diversion. Will check that one.
1 Like
Previously I had a look to the fluid.dataset helpfile for dimension reduction. It uses fluid.standardize~, fluid.mds~ and fluid.normalize~. Basically why choosing PCA instead of MDS? Also, what about the question of my previous message about the combination of raw and averaged data in the same set? Is this combination mandatory to get meaningful results or if it’s for the sake of comparison, how do we compare data which are in the same set. Wouldn’t two sets be easier for that purpose?
PCA is just rotating data to remove redundancy. It doesn’t distort the space. Less efficient in term of representing radical dimension reduction (because distortion of space is important, see UMAP discussion)
but it is simpler and easier to deal with in real time.
and will allow you to process your input points (by opposition to MDS)
in effect, you just remove dimensions that are redundant to help the network.
===
Combination is not mandatory. Actually, nothing is. FluCoMa is about trying and see what works best for you.
I would try just the real-time 46 in pca. then the 92 in pca. see which one converges and has less errors.
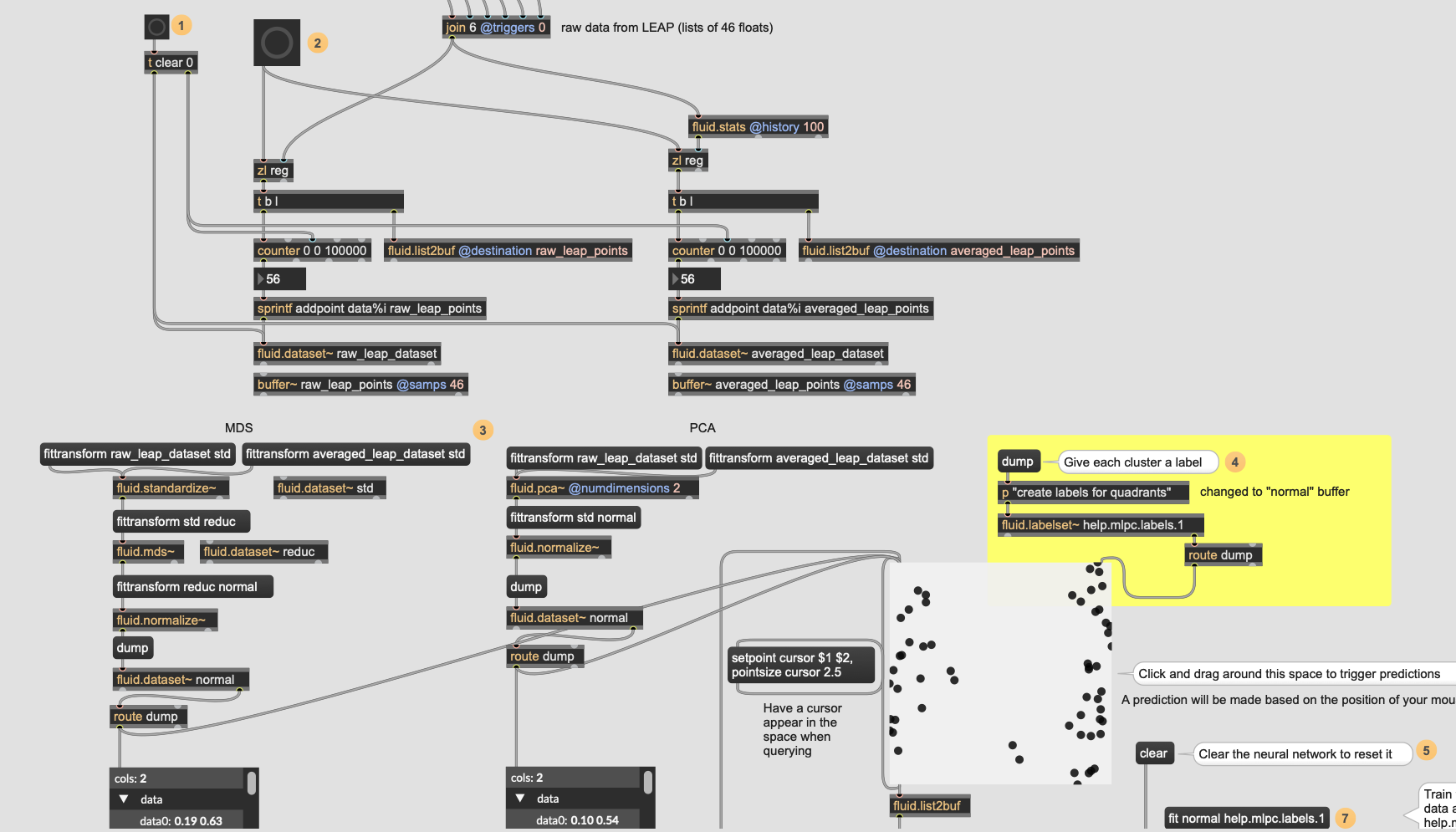
All right. Now I have made two datasets, one for the raw data, one for the averaged ones.
I have then the second part of the patcher where the dimension reduction is performed and I have merged it with the adapted example of the classifier help file.
However I still don’t understand how to teach my network the classification. The example relied on a dataset with easily identified clusters of data with clear boundaries on the 2D display and this is not the case here so I don’t know how to define my classes.
Obviously the question is: how to build the labelset and associate it with the dataset? Currently reading the helpfile of fluid.labelset~…
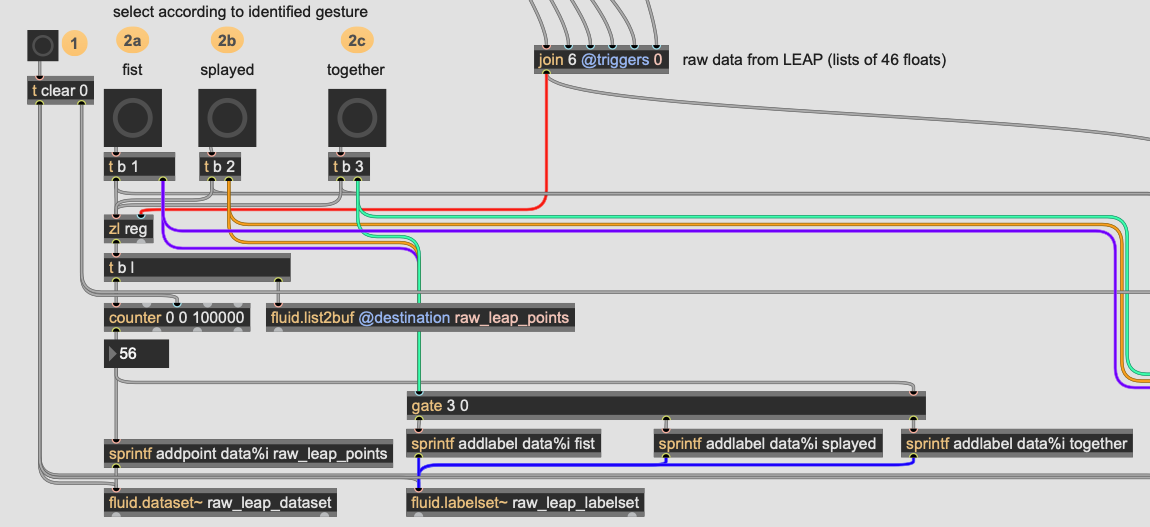
OK. Is this a correct way to associate labels and data in a supervised training?
It seems to function actually. Now the convergence seems to take ages. Tomorrow I will try to feed more data to the network, then I’ll be able to compare raw vs averaged and MDS vs PCA. Also the question of the number of dimensions remain. Obviously 2 dimensions are useful for display.
If a training has been performed with data reduction, is it possible to predict the output of the NN using realtime data? I mean, data reduction is performed over a dataset. Should I create a new dataset for each new data coming from the controller? Is it actually possible? Or is there another way? In between I’m going to try a variant without dimension reduction.
After quick tests I can tell that dimension reduction makes the convergence of the NN much slower. Also, without this reduction, averaging accelerate the convergence too. However, as my question about realtime dimension reduction remains, I can’t test the NN with dimension reduction but the NN without dimension reduction performs well so far.
One issue to solve is to avoid non-significant gestures to be identified as such (this is the very reason I’m giving a try to this classification actually). Let’s try to create a new class in which I’ll put ambiguous gestures…
Yet another question: what’s the best choice?
- Predicting raw data on a NN trained with raw data?
- Predicting averaged data on a NN trained with averaged data?
- Predicting raw data on a NN trained with averaged data?
- Predicting averaged data on a NN trained with raw data?
OK there are a lot of confusion in my brain now.
- your data is clearly segregated in 2d, which is quite strange from 46d. I would expect something messier.
- the idea was not to use averaged data only, but instant contactenated to average, to double the number of dimensions
- the idea of dim redux was to help to remove redundant information (hence using PCA)
training a classifier with such segregated data should be fast… that is, if all points in a cluster are from the real same class. yes, you need to label, but your original question was how to segregate 2 classes so I would expect your data to be labeled with many examples of each gestures…
real time data will be possible indeed. a class for ambiguous gestures might be good in the training indeed…
in other words, let’s start from scratch what needs to happen, like in the tutorial on classification:
- you need many examples of each class, labelled.
(try and see, it might work there)
- if it doesn’t converge at all, 2 potential problem:
- your descriptors are ambiguous - you generate noise instead of data that can be separated
2.your data is super noisy and complicated
if 1, you need to find better descriptors. machine learning only works as good as what you feed in
if 2, you can use PCA to try to remove noise and redundancy - the more examples you have the better it will behave. the fitting tells you how much it ‘loses’ but ‘losing’ details is the whole point of denoising too, so you have to play with it
A good news: you can test for the quality of your description with a KDTree. If you fit your training set there and query a new gesture, are the nearest neightbourg in the right class. if not, then you are not describing well, or your dataset is too small to represent the richness of your classes, and any further process will be bad.
so test your description first. in high dimension. that is for me the first part that seems to bail.
Actually two classes was my worst case scenario, I was going for 3. With 2d dimensions 2 classes were mixed on the right side of the display. Also, I still don’t understand how to reduce the number of dimensions in real time.
Actually I have reached satisfactory results with the 46 dimensions. The “garbage” category helps a lot to put aside ambiguous gestures.
The convergence of the NN is good I think. It goes down to 4 decimals in a few seconds when pushed by a 5ms metro. It needs a few minutes to get 4 more.
I can’t spend too much time trying to improve the patch further because the premiere is approaching fast and I have many other things to do but I am happy because I have a much more robust and flexible system now. My concern is more about the lighting conditions. I bet I will have to rebuild a dataset on stage.
The code is pasted below.
Thank you @tremblap !
----------begin_max5_patcher----------
4558.3oc4cs9iaabD+ym+qfPnEnE8pv99Q+jMRLJLPgafQPyGRBB3Iw6LMzK
Pwy1IAw+s28AoNJI9XkDGJdNMMRQj5Dm42Nu1Ylc2e+E2L4t0eNY6jn+UzOF
cyM+9Kt4F2krW3lhOeyjkwed1h3stu1jkIa2F+Pxja82KO4y4tqee517xKtI
Ne16SW8vujkLK2+iKo5oD9sQXj4+.YdW6diPlhh94h+rUOtLc0hjb2Ch7zEW
+Xd4UwEWMct6gt9tO7OwJV4y0+Ey+0MI9G5jIQ+r8N+wKdg8kaOOVrNtgirT
uVIsu4+PuvJjdlULOx6RxZgSvXFxMvnkl2kl+QvjBrlvjraijtAIVibFtVNi
TGmgdhHxhWljmj8KIqhuagi+PE2690qx2l9atqQsnZSfwsQStKd0CmGnb+h0
FBtEPghXEBqLlSXkRaeDtcbvb04IyRWFuXyh3Yd0ML5XPRDFDksL1QmBXPml
Tv+TVZdq5DRhWPB4TGnr9RoP225DIex76dD+sIZ16WudaxuLONOtM9j4ENTb
mxg2DPOvmLZa7YU5wnP64tB1yHTjtH4iIYaSWupxu9MSh2roxkuoxehES9vZ
2Oj91cWJck+RncWJK4iok+8xcWMNyfJ4FH4wLGMN4yhRiv1el0ySxV8XpiT7
WzL5TPRtwgUFw6saL5Bt+X6vU4sqnDxdRLBq3D26HbEf9lIOjkNuzdgwVF28
c3U+F64eqJ+WUJYuq2lzx9RLeXc5pHQzKyyRe3ACLGgp90pQzw6n.KEE7xQV
UNV7Qr+MNVD5PwHBsJQzjJyMkpMECNmI33nyfXZl2nvtWaliQmJGiQ7VY43U
+Ztkllr2yb15kKSV4GHq9mmtZdxmqH4NX3ToyF+q.gTRHPJROhTdZJHQJBgD
JRgaDoPMgT5IWKgkVr37aKhbOxkwahPQ3HRDMhEwMFgvlOh6.1T3hnYJLCw6
17CoQfiz.vIwsa+4191FDXvkfPG.3B80BbwnD3gKg9qE3hvFB3R80BbUD5Dr
nkb7fVYlGehAenFbBGXfkZr6UI6RBqTzD3H5FbN7euFhVUErjF4pHLIv.u.V
3helBWOMWlEoqZZtLN1xd+5AxsqeLaV4ipbVBQ6yeyS1lmtJNuXxd+Xk.gre
yfFIOUxvIUYFtBfNrNJAlNHgPGB3wCbPzgBb5HH4CqQS3nC6T6BjNDfRGxfo
CNniKgRGkJ3.QFpSgLvfQF5SgLHPQFkllBiLnfQF3SgLXfMnvOExfCpELVPd
VvMppTbQ+U5szLa+Jo2m1ZcYdpDD9rZJjcTurcETX+vQn0jP8cYApkv39SeF
m4Z43Kiya2jktJ+9n4IlgsjEw2krHxVth+ZZWSNG63Fo1OoSV.YdFexYWTLf
Yd9tGyyMxHsy0TSD8FcHgR4XWV4q8ISy2mFZrvc0CJUJSWOAL6W9t8Eel+3x
MclEGmfhP4L2P0WxTgZBxFxJTDrxzl0lODlxDQRfWYBON.o+gg+TcolIHV0L
ImAmLS6oIM0la9ABQd72RsoU.ElsGIAWeKhbJfBsdPo8bg5Lsb6Su26XzEZo
onCfDbEXRMrATGJnBWgwLm4UsFtRWQNoBWQGZHP5CjEiPJ3pd2Uq1csoSjkD
OuK4CJxEQIW6MkRAPofqGPsh1vipMTTm.BiWeSE0C.h.MR.j.DPXJm6DAl.m
7g7Yj7QAdvETvDO3pmOhGDeu2Ups.h3gXbDXpK38n3OljYvq4tl1aamNeHRm
SGAy2AVT7kD4dSNeLFXGxZDZC0JxkRhv3cr6Mc.pJzSMfTr.EVQBuRBItDlz
sTBuXNvkUnmBhTBZvkRBjs8cIjPCQUPYinFRnb9+wymWMSZQODmc2A1fqspw
9X349t3DKkPjE.Fe.s1VFobcf02+tW8l2F8eeaz6d0OzkbjuwnkHlucDb3RO
GfOcnrwlGcWDqytuv6tE4bm3aCpyUPnIEGhHnI6OnSxeSVx7zY49Lm8W5tMK
HNOOxho.CQrZ5QRpEuewioymtHcaN4tGuOTfwmpHPLjnaOUHFh7daMdFH34g
XiGotSgVIvHJrzR.IwhjQR38ml1TQZTjdPADkIk5YnxTItPDfoKozOC0kJvE
gVAlpjBMRhU46d2q+127MeuMTkZhXw1DAyV+nOifzN5XduuJA0WCd+5yP1qg
xHv8YjL4qe3gEIAJKPz9bMV9ZOpivwWTYQGx54XHrr0Q7Nybu1aQA4jHXfTj
q.JnSuhJAIsvEEQmnAqH5DzWYRKkXlW2BDgkPlPvfE6x8oUyxRR7lx7wE49P
f4cYmNFqv8DFh7WNRB2yBYYwe57QqRYLeysf0HHJMx3pSMNLSMF6WI4ueWez
0DRoQCPlZ3ibrZ6lEw+ZRWEPP5wncPEGDnhONfJatcncUfIB741gytN41oCn
gzYa+H7PCAPngNJglNWbeZZEngylZ2RUPbA19uTIF.fhL5.J2LSYcu107ZXL
kKxRthOEyHJIUioHlVgImuWMVSfEN70x101tck8UolQPVUi1gDt4YTIhwUpU
KhQ5KmVHSE.kukyLtrgvjEiMdJwUdzLC9j0o8JbgnCsv6OHUvncu9NBEFSTU
2CrZtQi7cuJq.BPP.AX0EMO2C1WmFTaRUaO5Clpm6VaCDe4XuRGm.RSSqGGF
ob4WLIysN2wH6+KTwOeWQhwA.O7S1uGo6tnthqugNnpEAhQT+DeMQIL0se0I
EDhlIEZJ.FsvAEV0.68qHcAeo9btDplH2O4NjFDq8jwiWPeEY9Rslshd413k
a1FwDcAaDebpDr20.kCBr0dTV2uXcb9f6FX+BvE8xJqixyxU.y2IZE15LJvP
3JfLpp38usHJK4gPMv4WLDTEDcfEVLvJlsUotr3O4hoH59r0Ki9Ou9UeWzey
JmsMZ88FUxHm791+dmMbj2g.op9YeuefImLjJaayis1lduAKVm8q1XHBL24j
hMWvKqoEaZAGQtFs2YHguSzE6cdbvhdmPwecD89tpNDj05BjkWtYUhAvXsI9
smowsWJ24Wd0vD1NgndNG1dADQKV2WCPT6jNR0.LQs2Z2yZLjGY9+4uOIpnO
uRlG4xZ0zF6MERGU0xm9JMoXmwkVtjO5S2dZ1jAChRh9oIIYYqy9oIQw2aUC
uOM2Dn4CNXyElP7p4tO3y224hbb4dHmOeo8NxwmLXURtyLDq7ls09d3.STPz
PBnQREP8K3Aa80q1Rkg0STJeUHHHJ.KOFBRdEhepMQmhjtFxNuXwJKyWMT7A
3h8G7COZlU38oy1s+5f6QQq87.V8TBfr6TB3Z2PGFBAIPntJnLWg7BZ99TU.
hlndLUqlkK17zVdzWrSpY97jU1tQHaqc6SOdVd5G8YS.G8RqD4pLaoCQSMeb
4ZqGiGW5+zGiWjN2+UCrgWUBjuSrfHcMD7HZGC8fTCdXuEEXX9ESkVpfH6VJ
w3KofGLanSNefE6l+DDCDD64V9.OsIWVLuoh2HTADYBTpe1kIvx4L488BSh.
kCsx3ktV+KVb6LehtfYs9ydNs2XPnEKXL3.DA4OamlHpN43Q8gHhOMcPhOz9
DeHCL9TzXdPhOrP5K+q0VzTHXTQecBIFw6aLhMvXTQaACIFI5aLhO3lpAGij
8MFIFXLR3yAIfXjF0m1qkCL9nnfiO59DeTC9gFFQA9wqVH68lmBHoG7fhzBv
AIbOCRXzPuyLpjX32YF2O+nmU7gfbfnfC9.uv1e2.dPSD74LwQew0Yy86S6H
XHsP2W+A8.RIzy3.WCHNv.TvzlpkAOLLzFcTHdqC8T1AMJzwvC8vD6TkffAf
HgiPfdJDQBWaGTAFa+jD1oxjiN1WBeY57hbgWbjQvr6K31lekQn19fAy0bMh
orsh.FU1YrGbygzPlq+YB6Hbg.43+te8.NJYvihweOEGz3uYjVIXJARPjTJi
K36x2eM2aP8UD7vecNYOjcItyF.NSMEKEHphHURJgwz1lTUPa3lCpe6v4WFK
X9UOUwoXk1LAMoVyoLyEozFtW8rK4Zyt0DmRCrqQnlPoHhfg3HsTik1oNPa3
d0ytzqL65plePrqx7lVoHJr8HZxtCbbvEGR0UUvg1Qf7noamI3tw4gNvbWeW
El+aDcviLGEbPNfNwJTvw7gHPNCA8opsBiRUvm2iDHiDWEbVI3PNsMUvdL3P
drSpBd5QbHEQUjPEQQPFcrfLJzT35SMXQXPCznfL3xQQdV3pwAYHFE4yfORR
qhSFMnvP3ZvoCz0mNTgeXWCY5czgJdngz4llNJLmqIAm5OAfGsypP8pnfzEq
RMNBFMT8UEjpqhwQ3FgNaIEjlL3iBrfD5PhXbLueht4IWStxDmaOg6.mQGj7
mh7YwjxoTtRvXHECIoBD0txeQnohJ6acBsp1u5PlZg5.7qQfOjvqehDRKX0k
full4Fn5sHU+kRRt1k7QJdplpIDIWgQDlM+qk4k7naAFaEN7pORf.ZcgfyAn
acr1DwAUBJCE3.c9IgZs.xzH6VVJA5NAT5fKtfhBMa8h0Y9uiqhd9kPawKso
MqwXeIhP1ZlHEZjPP0JsfVo7QGcOvv.90.CjkkPCMkiPTk.SYHBQwj6gAGbO
vvffSdfrypkwntZ+RYFKxXa.AbJQnPH9thkc7sFzZQ3XVbvgK09.N1OpKQXs
.24nNiIc.ffOkI0LhIFJBVSjNAeV8255OliCdL2H3hkLgcrEqXBDR8TAvq4l
Cam8Q6OYbpj6YI0TiMTAkn0JBWKopmDxO9dCqTNsejxKDvEbaa5nHXgTQIjm
rz0JL4CNiJzSIBlYTmR4bkjSwUj2O5dfIvS6OA9cB.iYAdROJviHdVRLkZML
IIZtfIDBYEA9it2vJvS5Ky5LgjvjbiAcN0LtcBd0sJ8jC2E7oRlUNvhIFG4Z
Nxp9TJ9e78.S7mzih+khCiYwebn8gKGzIbTSNWZhN3fSGzfhyEd5Hr3sgrTD
tSo4.yZFn8cK6pL+CLFsaRXTlTvE1t7pxLOJuHXrcvQgy.s8qYzqA7uCnEF+
EZE27enYBNgKtsk6AVq+J5uHE33ho+YhYDaL7KqNuucWaXa0WQOFJLN3gXhe
tdbitDRw0TI+I29Ut30ePEG7fpQxj3GRq5kmz7HJBv0LQXqUAPWHa3wQeAsa
EpDvXMrKbsfk4HftVFPgFqqFzEBF5jLqh6XJ3nvlzsfh8Fa4SoRDkioXMAgI
Z6TQ7Ycrl6Mjcqt9z5B2AsDJASaJTyjF45RZ5qTymGzP5oQZEZl9q3d0StNh
ox5B2SbGbv+l7476dLO2778OtZ2GXProV+YZlwOlaOalYOF6Ly+msa+.s51r
+AaqnQu8sk+30slwqeKSc+ip.xSTWia15MuMp9zFgMHnig0cniDcVnS7hEWJ
7nuNvy96aYU12cShm2BfYWeL1IRo8XywGPA0tUkU+1uP8mpQMt+jchL39aS0
U1hpe2qdyasmn7u5+8528p+8q+1V3VaNtbrqp7.YfcjDQ.i6n53W+IF+IxTc
JPKDHOA6OOV7GxR1WOE5stwG54oFWYKsrmF+dHN6tJBt0gAbtGCX9cCUZuMl
IlziLx28tW+su4a99n28penNww51KzqeGjG641hiP5hCxU5kytTz4vt6cbzW
qIDcgHpxetppKe8hEQwmkH546goKNEa2O+qXszevUZe8hYU1vxpMICuMYgga
ihmMyDkiaS9ecT5by2ztMQOO5ASHROl0FDwjNsSkeGzpbGauGzUoRPruxkL+
FRcOadkIGXyqcxoLkFFNkNRbjbv4Nesi1BOFvn8qiDNoOcjr+gBe8ikROevp
bvJ0G7AuO4iJGAFMsMS6cqSqXLsO3BEHlJXHILghIv8jFjiP1e+2xy4GN83B
9ul7PsW+X1XeIuWoPNHCGGA6m1Cmz4CuRwsN+mEcuZizX5brTj9heV3feVpK
8YseSq15yRdw7EI3mE+ReVLYvOK1E+rnA+rnW5yRDtrA4ReV6m7+VeV3K9YE
trwkpKeBCWhKkszCm1EJDIdwQ3m2GP7lMeLIaawW18PLd69fOA85aceLck+i
NGLSxR9XZ42W5tRblwCXtw8mMheqypOK7yRYxx0FC9qdLsvlug8LORmmzUF2
Wa2D64DmC2W7Gu3+CgtCQbC
-----------end_max5_patcher-----------
3 Likes
There’s an error in the code I’ve posted in the previous message. A cable was missing so the number of dimensions should be 54!
1 Like